
Page 61 - Spin Transport and Spintronics
P. 61
2.5 แบบจำลองทั่วไปของการสะสมสปิน 62
2.5.2 ระบบพิกัดพื้นฐาน (basis coordinate system)
การสะสมของสปินจะมีการเปลี่ยนแปลงตามเวลาและตำแหน่ง เพื่อความง่ายในการพิจารณาผล
เฉลยของการสะสมสปิน วิธีการแปลงเมตริกซ์จะถูกนำมาใช้ในการวิเคราะห์หาคำตอบซึ่งเป็นวิธีที่อาศัย
ˆ ˆ ˆ
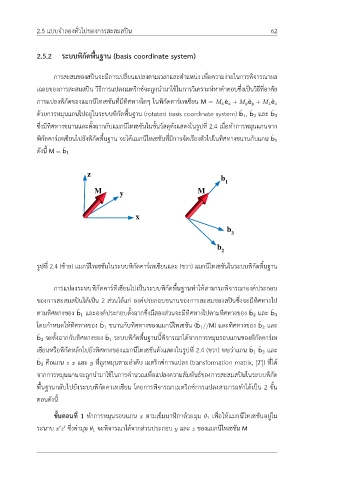
การแปลงพิกัดของแมกนีไทเซชันที่มีทิศทางใดๆ ในพิกัดคาร์เทเซียน M = M xe x + M ye y + M ze z
ˆ ˆ ˆ
ด้วยการหมุนแกนไปอยู่ในระบบพิกัดพื้นฐาน (rotated basis coordinate system) b 1, b 2 และ b 3
ซึ่งมีทิศทางขนานและตั้งฉากกับแมกนีไทเซชันในชั้นวัสดุดังแสดงในรูปที่ 2.4 เมื่อทำการหมุนแกนจาก
ˆ
พิกัดคาร์เทเซียนไปยังพิกัดพื้นฐาน จะได้แมกนีไทเซชันที่มีการจัดเรียงตัวไปในทิศทางขนานกับแกน b 1
ˆ
ดังนี้ M = b 1
รูปที่ 2.4 (ซ้าย) แมกนีไทเซชันในระบบพิกัดคาร์เทเซียนและ (ขวา) แมกนีไทเซชันในระบบพิกัดพิ้นฐาน
การแปลงระบบพิกัดคาร์ทีเซียนไปเป็นระบบพิกัดพื้นฐานทำให้สามารถพิจารณาองค์ประกอบ
ของการสะสมสปินได้เป็น 2 ส่วนได้แก่ องค์ประกอบขนานของการสะสมของสปินซึ่งจะมีทิศทางไป
ˆ ˆ ˆ
ตามทิศทางของ b 1 และองค์ประกอบตั้งฉากซึ่งมีสองส่วนจะมีทิศทางไปตามทิศทางของ b 2 และ b 3
โดยกำหนดให้ทิศทางของ b 1 ขนานกับทิศทางของแมกนีไทเซชัน (b 1 //M) และทิศทางของ b 2 และ
ˆ
ˆ
ˆ
b 3 จะตั้งฉากกับทิศทางของ b 1 ระบบพิกัดพื้นฐานนี้พิจารณาได้จากการหมุนรอบแกนของพิกัดคาร์เท
ˆ
ˆ
เซียนหรือพิกัดหลักไปยังทิศทางของแมกนีไทเซชันดังแสดงในรูปที่ 2.4 (ขวา) พบว่าแกน b 1 b 2 และ
ˆ ˆ
b 3 คือแกน z x และ y ที่ถูกหมุนตามลำดับ เมตริกซ์การแปลง (transformation matrix, [T]) ที่ได้
ˆ
จากการหมุนแกนจะถูกนำมาใช้ในการคำนวณเพื่อแปลงความสัมพันธ์ของการสะสมสปินในระบบพิกัด
พื้นฐานกลับไปยังระบบพิกัดคาเทเซียน โดยการพิจารณาเมตริกซ์การแปลงสามารถทำได้เป็น 2 ขั้น
ตอนดังนี้
ขั้นตอนที่ 1 ทำการหมุนรอบแกน x ตามเข็มนาฬิกาด้วยมุม θ 1 เพื่อให้แมกนีไทเซชันอยู่ใน
ระนาบ x z ซึ่งค่ามุม θ 1 จะพิจารณาได้จากส่วนประกอบ y และ z ของแมกนีไทเซชัน M
′ ′